
Micro-fusée 1: Icarus
Icarus
Icarus is a micro-class rocket designed, manufactured, and launched as part of the Top Aéro association’s initiative at Sorbonne Université. Its goal is to develop a reusable rocket capable of achieving a target apogee of approximately 500 meters. Icarus features a custom electronics bay, a servo-actuated parachute deployment system, and utilizes a custom spreadsheet (StabTraj) to calculate key flight parameters.
CONFIGURATION
Longueur
Diamètre
Masse
Moteur
Apogee

LAUNCH
Play video
PROJECT RAPPORT
The Icarus rocket represents a comprehensive validation of applied engineering principles. Undertaken during an 8-month academic exchange program, the primary objective was to successfully design, build, and launch a reusable micro-rocket. The project covered all phases, from simulation and CAD design to 3D printing, electronics integration, launch and recovery.
The rocket’s airframe and structural components were manufactured using a 3D printer with PLA+ filament, chosen for its strength and ease of printing. It features a custom electronics bay sized to house a XIAO ESP32, a battery, and a servo-actuated parachute deployment system. To interact with the rocket, a custom mobile application was developed, allowing for remote initiation of the countdown via Bluetooth.
The project culminated in a launch campaign, where the rocket exhibited a stable ascent and the parachute deploying as planned, validating the team’s ability to solve complex interdisciplinary challenges.
ORIGINS
The project followed an iterative development methodology, cycling through design, analysis, and prototyping stages. The initial design phase was conducted using OpenRocket to define the rocket’s architecture, including the selection of materials and component placement.
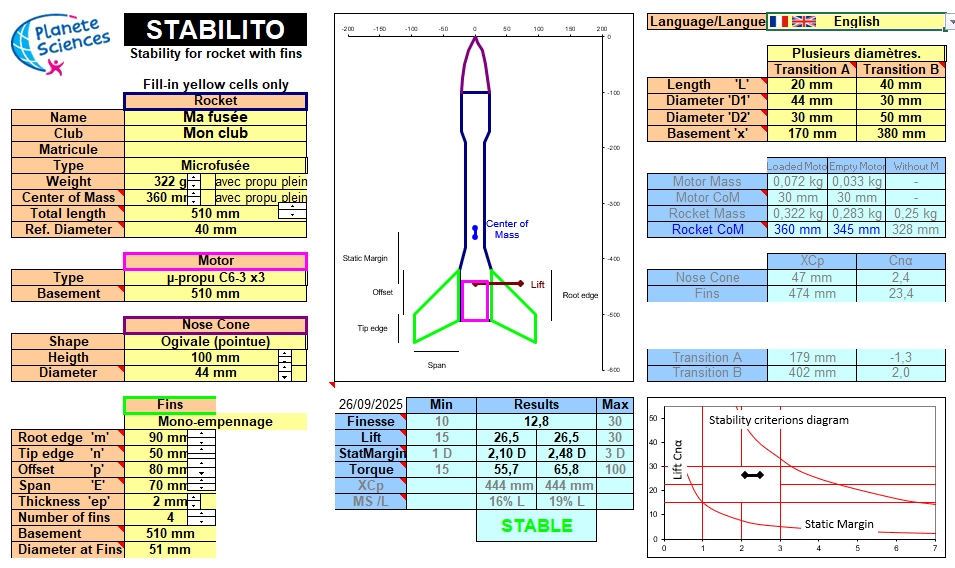
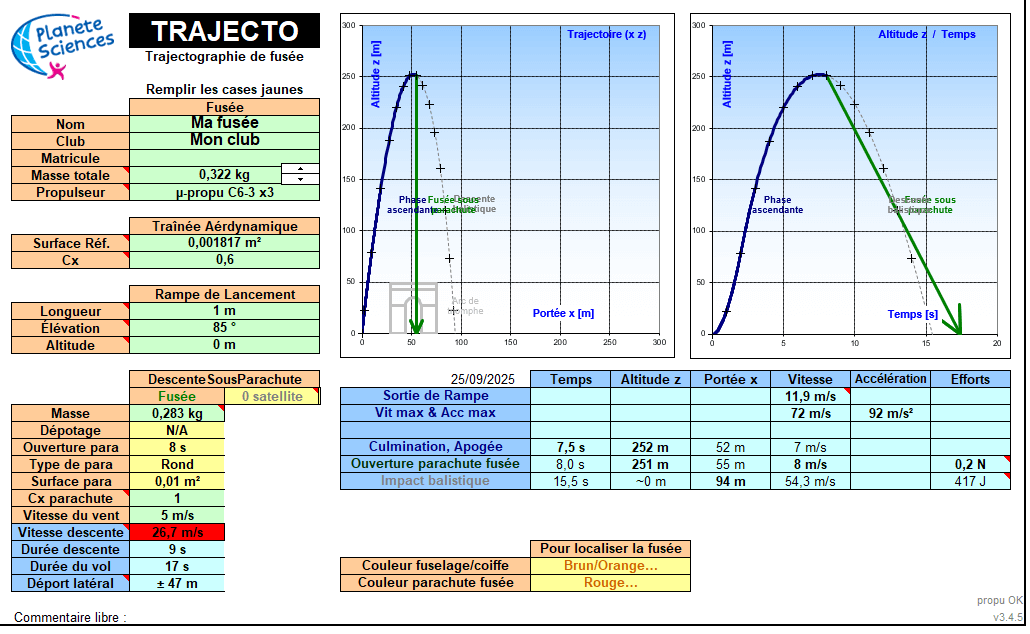
To validate the OpenRocket simulations and gain a deeper understanding of the flight dynamics, a custom spreadsheet (StabTraj) was used. This tool was used to calculate key flight parameters, including the expected trajectory, apogee, maximum velocity, and stability margin. The data from the spreadsheet was used to iteratively revise the design in OpenRocket, ensuring that the theoretical performance met the project’s objectives.
IMPROVED VARIANT
For the final launch, the Icarus rocket was modified on-site to substantially increase its total impulse. This version featured an eight-motor configuration, an increase from the previous four. A key challenge was maintaining flight stability with the added mass of the additional motors at the rear.
To maintain stability, a counterweight was added to the nose cone. This modification was managed through the analysis of a counterweight system. This iteration successfully achieved an apogee greater than 500 meters, with the parachute system performing flawlessly. The integration of mechanical, electronic, and software systems in this configuration presented a complex task that was successfully resolved.
Team


